

கணினி கண்ணோட்டம்
இடைவிடாத எடையிடும் அமலாக்க அமைப்பு முதன்மையாக நிலையான சாலையோர ஓவர்லோடிங் கண்டறிதல் நிலையங்களுக்கான வணிக பயன்பாட்டு செயல்பாடுகளை வழங்குகிறது. இது முக்கியமாக தொடர்பு இல்லாத அமலாக்க முறைகளை ஏற்றுக்கொள்கிறது, சரக்கு போக்குவரத்து வாகனங்களின் கண்டறிதல் மற்றும் எடையிடுதலை முடிக்க முன் ஆய்வு உபகரணங்களை நம்பியுள்ளது. இந்த அமைப்பு மாறி செய்தி பலகைகள் மூலம் ஓவர்லோடிங் தகவல் மற்றும் தடுப்புப்பட்டியல் தரவை வெளியிட முடியும், மேலும் இது நிலையான சாலையோர ஓவர்லோடிங் கண்டறிதல் நிலையத்தின் மென்பொருள் வழியாக வணிக செயல்முறைகளை டிஜிட்டல் முறையில் நிர்வகிக்கிறது.
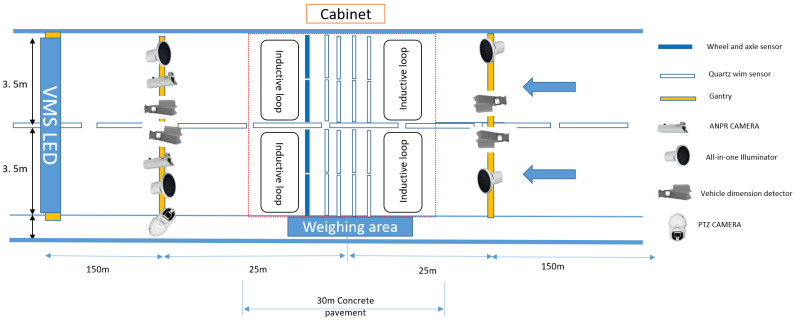
வழக்கமான தளவமைப்பு
செயல்பாட்டு விளக்கம்
●பிரதான நெடுஞ்சாலைப் பாதை வழியாகச் செல்லும் வாகனங்களுக்கு, எடை அமைப்பு வாகனத்தின் மொத்த எடை, அச்சு எடை, அச்சுகள் மற்றும் டயர்களின் எண்ணிக்கை, அச்சு தூரம், வாகன வேகம் மற்றும் வாகன முடுக்கம் ஆகியவற்றை தானாகவே கண்டறியும்.
●இந்த அமைப்பு வாகனங்களை துல்லியமாகவும் திறம்படவும் பிரிக்க முடியும் மற்றும் வாகன வரிசைப்படுத்துதல் மற்றும் பாதை மாற்றம் போன்ற அசாதாரண ஓட்டுநர் நிலைமைகளைக் கையாள முடியும், இது வாகனங்கள் மற்றும் தரவுகளுக்கு இடையிலான கடிதப் பரிமாற்றத்தை உறுதி செய்கிறது.
●இந்த அமைப்பு ஒரு தானியங்கி இடையக செயல்பாட்டைக் கொண்டுள்ளது, இது ஒரு குறிப்பிட்ட அளவு தரவைச் சேமிக்க அனுமதிக்கிறது. சாலையோர ஓவர்லோடிங் கணினிக்கு தரவு பரிமாற்றம் தோல்வியுற்றால், அமைப்பு தரவை மீண்டும் அனுப்ப முடியும், இது தரவு தனித்துவத்தையும் ஒருமைப்பாட்டையும் உறுதி செய்கிறது.
●வரையறுக்கப்பட்ட தரவு இடைமுகம் மூலம் எடையுள்ள தகவலை பின்தளக் கட்டுப்பாட்டு கணினிக்கு அனுப்ப முடியும்.
●இந்த அமைப்பு ஒரு தவறு சுய-கண்டறிதல் செயல்பாட்டைக் கொண்டுள்ளது, மேலும் ஏதேனும் உபகரணங்கள் அல்லது லைன் செயலிழப்பு ஏற்படும் போது, அமைப்பு தொடர்புடைய தவறு தகவலைப் பெற முடியும்.
●இந்த அமைப்பு தடையற்ற, தொடர்ச்சியான மற்றும் அனைத்து வானிலை செயல்பாட்டிற்கான தேவைகளை கவனிக்கப்படாத முறையில் பூர்த்தி செய்ய முடியும்.
●முன் மற்றும் பின் உரிமத் தகடுகள் சீரற்றதாக இருக்கும் அரை-டிரெய்லர் வாகனங்களுக்கு, முன் உரிமத் தகடு மற்றும் டிரெய்லர் தகடு இரண்டையும் கைப்பற்ற, பின்புற வாகனப் பிடிப்பு உபகரணங்களை இந்த அமைப்பு சேர்க்கிறது.
●இந்த அமைப்பு அதிக சுமை கொண்ட வாகனங்களின் இரண்டு பரந்த அம்சங்களைக் கொண்ட படங்களை (வாகனத்தின் முழுக் காட்சி, உரிமத் தகடு, நிறம், மாதிரி மற்றும் முக்கிய புவியியல் அம்சங்கள் உட்பட) படம்பிடிக்க முடியும்.
கணினி கூறுகள்
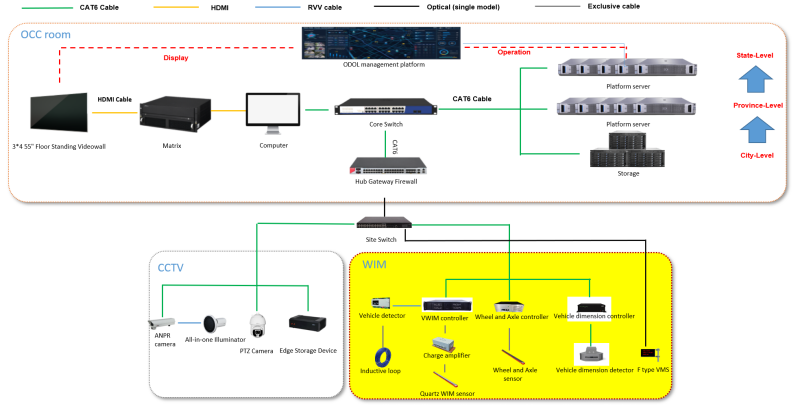
இடைவிடாத எடையிடல் அமலாக்க அமைப்பானது, ஒரு மாறும் அதிவேக எடையிடல் அமைப்பு, வாகனப் பிரிப்பு அமைப்பு, வாகன அங்கீகார அமைப்பு, சாலையோர வீடியோ கண்காணிப்பு அமைப்பு, சாலையோர தகவல் வெளியீட்டு அமைப்பு மற்றும் சாலையோர தகவல் ஒருங்கிணைப்பு பரிமாற்ற அமைப்பு ஆகியவற்றைக் கொண்டுள்ளது.
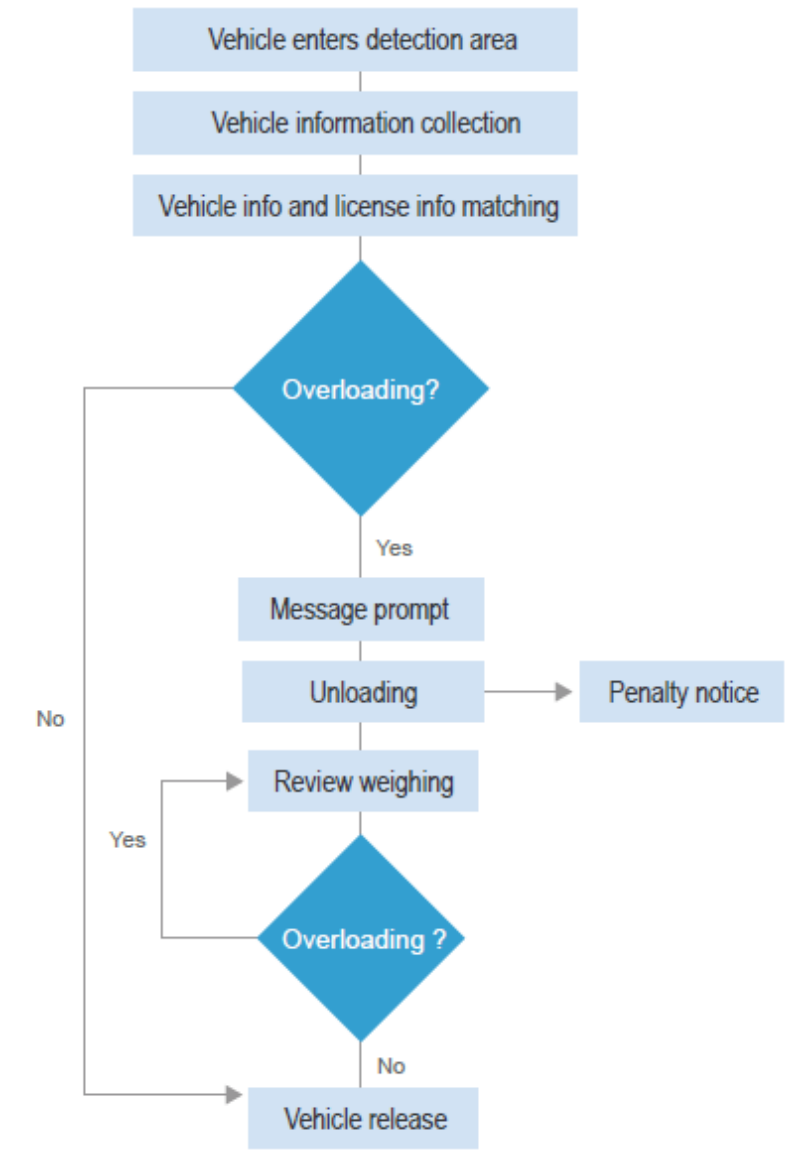
இடைவிடாத எடையிடல் அமலாக்க செயல்முறை வரைபடம்
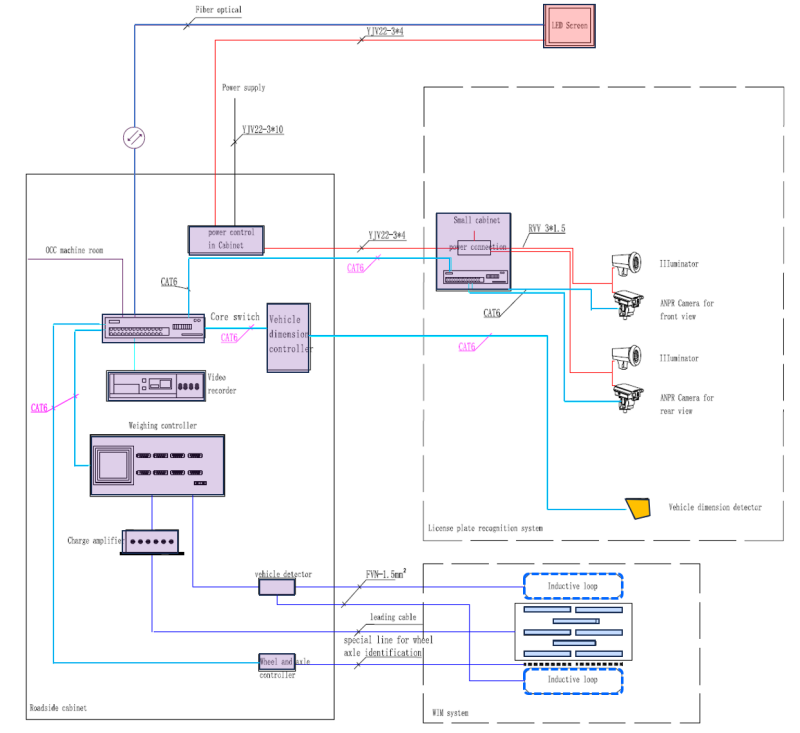
சிஸ்டம் டோபாலஜி வரைபடம்
முக்கிய தொழில்நுட்ப குறிகாட்டிகள்
●அதிகபட்ச அச்சு (அல்லது அச்சு குழு) சுமை: 40,000 கிலோ
●குறைந்தபட்ச அச்சு (அல்லது அச்சு குழு) சுமை: 500 கிலோ
●பட்டப்படிப்பு மதிப்பு: 50 கிலோ
●டைனமிக் கண்டறிதல் வேக வரம்பு: 0.5–200 கிமீ/ம
●டைனமிக் எடையிடல் துல்லிய நிலை: தரம் 5
●பகல்நேர உரிமத் தகடு பிடிப்பு விகிதம்: ≥98%
●இரவு நேர உரிமத் தகடு பிடிப்பு விகிதம்: ≥95%
● உரிமத் தகடு அங்கீகாரம் மற்றும் எடையிடும் தரவு பொருத்தத்தின் துல்லியம்: ≥99%

என்விகோ டெக்னாலஜி கோ., லிமிடெட்
E-mail: info@enviko-tech.com
https://www.envikotech.com
செங்டு அலுவலகம்: எண். 2004, யூனிட் 1, கட்டிடம் 2, எண். 158, தியான்ஃபு 4வது தெரு, ஹைடெக் மண்டலம், செங்டு
ஹாங்காங் அலுவலகம்: 8F, சியுங் வாங் கட்டிடம், 251 சான் வூய் தெரு, ஹாங்காங்
இடுகை நேரம்: செப்-13-2024




